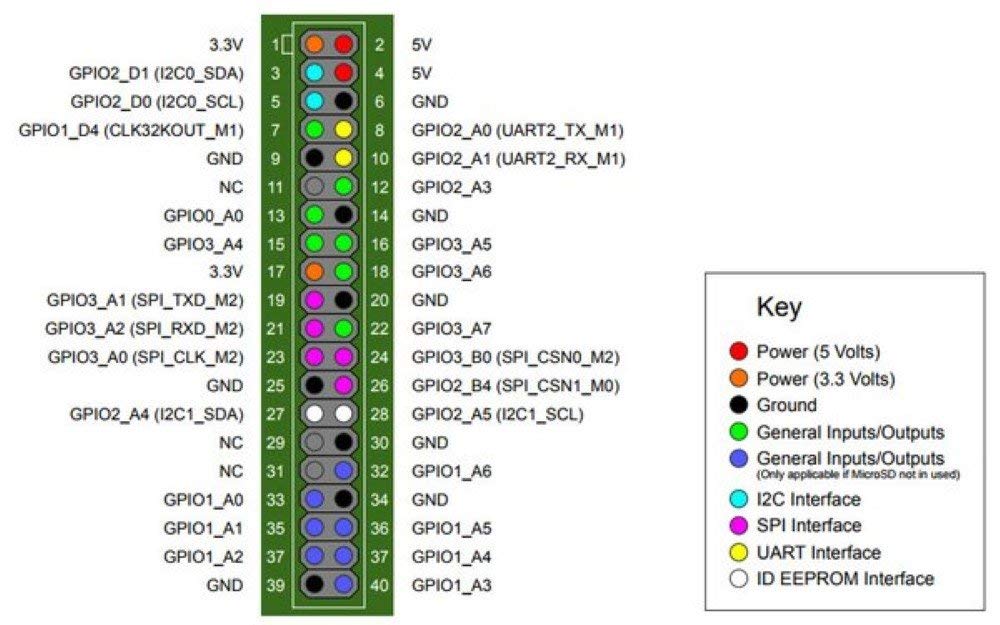
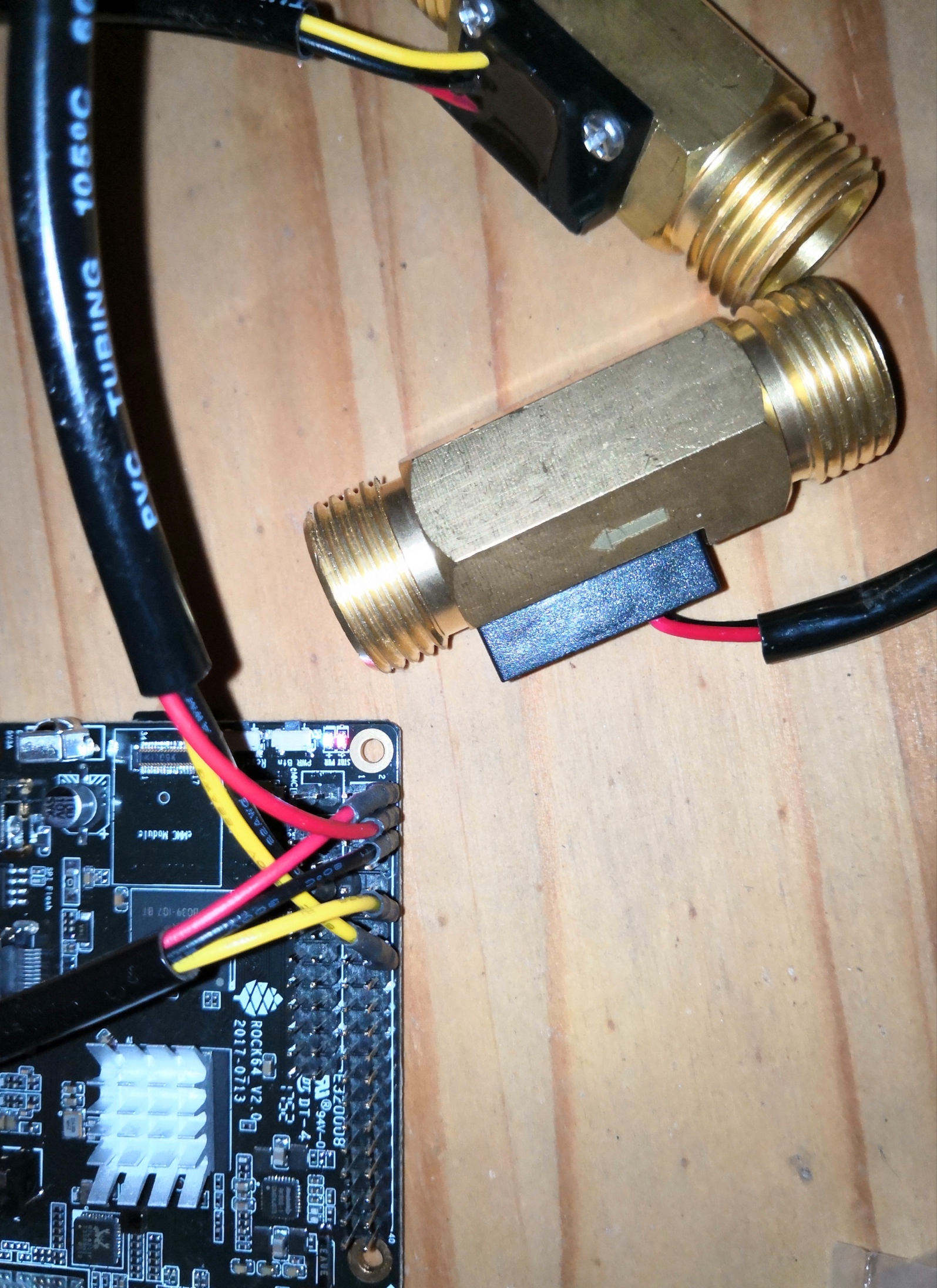
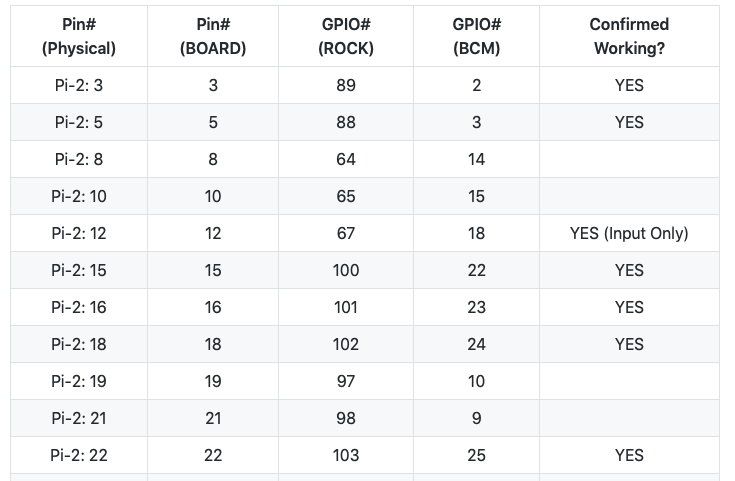
Présentation du Rock64 :
rock64@rock64:~$ df Filesystem 1K-blocks Used Available Use% Mounted on udev 2007204 0 2007204 0% /dev tmpfs 401844 10464 391380 3% /run /dev/mmcblk1p7 61228716 2045964 56657512 4% / tmpfs 2009204 0 2009204 0% /dev/shm tmpfs 5120 4 5116 1% /run/lock tmpfs 2009204 0 2009204 0% /sys/fs/cgroup /dev/mmcblk1p6 114446 978 113468 1% /boot/efi tmpfs 401840 0 401840 0% /run/user/1000 rock64@rock64:~$ uname -a Linux rock64 4.4.132-1075-rockchip-ayufan-ga83beded8524 #1 SMP Thu Jul 26 08:22:22 UTC 2018 aarch64 GNU/Linux rock64@rock64:~$ cat /etc/debian_version 9.9
Voici les quelques commandes …
Je commence par faire une mise à jours :
rock64@rock64:~$ sudo apt update;sudo apt -y upgrade
Ensuite j’installe les paquets de base :
rock64@rock64:~$ sudo apt install apache2 libapache2-mod-php7.0 php7.0-cli php7.0-curl php7.0-gd php7.0-opcache php7.0-xml php7.0-zip php7.0-mbstring php7.0-mysql php-imagick unzip openssl nmap
Premier problème j’ai dans les logs, sans arrêt :
... locale: Cannot set LC_CTYPE to default locale: No such file or directory locale: Cannot set LC_MESSAGES to default locale: No such file or directory locale: Cannot set LC_ALL to default locale: No such file or directory ...
J’ai ajouté dans .bashrc
export LC_ALL="en_US.UTF-8" export LANG="en_US.UTF-8" export LANGUAGE="en_US.UTF-8"
Ce qui donne :
$ head -20 .bashrc
# ~/.bashrc: executed by bash(1) for non-login shells.
# see /usr/share/doc/bash/examples/startup-files (in the package bash-doc)
# for examples
# If not running interactively, don't do anything
case $- in
*i*) ;;
*) return;;
esac
export LC_ALL="en_US.UTF-8"
export LANG="en_US.UTF-8"
export LANGUAGE="en_US.UTF-8"
# don't put duplicate lines or lines starting with space in the history.
# See bash(1) for more options
HISTCONTROL=ignoreboth
# append to the history file, don't overwrite it
shopt -s histappend
$ source .bashrc
-bash: warning: setlocale: LC_ALL: cannot change locale (en_US.UTF-8): No such file or directory
$ locale
locale: Cannot set LC_CTYPE to default locale: No such file or directory
locale: Cannot set LC_MESSAGES to default locale: No such file or directory
locale: Cannot set LC_ALL to default locale: No such file or directory
LANG=en_US.UTF-8
LANGUAGE=en_US.UTF-8
LC_CTYPE="en_US.UTF-8"
LC_NUMERIC="en_US.UTF-8"
LC_TIME="en_US.UTF-8"
LC_COLLATE="en_US.UTF-8"
LC_MONETARY="en_US.UTF-8"
LC_MESSAGES="en_US.UTF-8"
LC_PAPER="en_US.UTF-8"
LC_NAME="en_US.UTF-8"
LC_ADDRESS="en_US.UTF-8"
LC_TELEPHONE="en_US.UTF-8"
LC_MEASUREMENT="en_US.UTF-8"
LC_IDENTIFICATION="en_US.UTF-8"
LC_ALL=en_US.UTF-8
Je vais voir si c’est grave plus tard …
Ensuite téléchargement de NextCloud : https://download.nextcloud.com/server/releases/nextcloud-16.0.4.zip
rock64@rock64:~$ cd /var/www/html/ rock64@rock64:/var/www/html$ sudo wget https://download.nextcloud.com/server/releases/nextcloud-16.0.4.zip --2019-09-07 09:07:01-- https://download.nextcloud.com/server/releases/nextcloud-16.0.4.zip Resolving download.nextcloud.com (download.nextcloud.com)... 2a01:4f8:130:32f1::52, 176.9.217.52 Connecting to download.nextcloud.com (download.nextcloud.com)|2a01:4f8:130:32f1::52|:443... connected. HTTP request sent, awaiting response... 200 OK Length: 80053992 (76M) [application/zip] Saving to: 'nextcloud-16.0.4.zip' rock64@rock64:/var/www/html$ sudo unzip nextcloud-16.0.4.zip rock64@rock64:/var/www/html$ sudo chown -R www-data:www-data * rock64@rock64:/var/www/html$ sudo rm *.zip
Installation de MariaDB :
rock64@rock64:/var/www/html$ sudo apt install mariadb-server
Administration de MariaDB :
$ sudo mysql Welcome to the MariaDB monitor. Commands end with ; or \g. Your MariaDB connection id is 3 Server version: 10.1.38-MariaDB-0+deb9u1 Debian 9.8 Copyright (c) 2000, 2018, Oracle, MariaDB Corporation Ab and others. Type 'help;' or '\h' for help. Type '\c' to clear the current input statement. MariaDB [(none)]> create user 'nextcloud'@'%' identified by 'mypassword'; Query OK, 0 rows affected (0.00 sec) MariaDB [(none)]> create database if not exists dbnextcloud CHARACTER SET utf8mb4 COLLATE utf8mb4_general_ci; Query OK, 1 row affected (0.01 sec) MariaDB [(none)]> GRANT ALL PRIVILEGES on dbnextcloud.* to 'nextcloud'@'%'; Query OK, 0 rows affected (0.00 sec) MariaDB [(none)]> FLUSH privileges; Query OK, 0 rows affected (0.00 sec) MariaDB [(none)]> exit Bye
Initialisation de NextCloud :
rock64@rock64:/var/www/html/nextcloud$ pwd /var/www/html/nextcloud rock64@rock64:/var/www/html/nextcloud$ sudo -u www-data php occ maintenance:install –database "mysql" –database-host="127.0.0.1" –database-name "dbnextcloud" –database-user "nextcloud" –database-pass "mypassword" –admin-user "admin" –admin-pass "rock64next" This version of Nextcloud requires at least PHP 7.1 You are currently running 7.0.33-0+deb9u3. Please update your PHP version.
Aie … j’ai pas la bonne version de PHP : 7.0.33 à la place de 7.1 .
rock64@rock64:/var/www/html/nextcloud$ sudo add-apt-repository ppa:ondrej/php
Co-installable PHP versions: PHP 5.6, PHP 7.x and most requested extensions are included. Only Supported Versions of PHP (http://php.net/supported-versions.php) for Supported Ubuntu Releases (https://wiki.ubuntu.com/Releases) are provided. Don't ask for end-of-life PHP versions or Ubuntu release, they won't be provided.
Debian oldstable and stable packages are provided as well: https://deb.sury.org/#debian-dpa
You can get more information about the packages at https://deb.sury.org
BUGS&FEATURES: This PPA now has a issue tracker:
https://deb.sury.org/#bug-reporting
CAVEATS:
1. If you are using php-gearman, you need to add ppa:ondrej/pkg-gearman
2. If you are using apache2, you are advised to add ppa:ondrej/apache2
3. If you are using nginx, you are advise to add ppa:ondrej/nginx-mainline
or ppa:ondrej/nginx
PLEASE READ: If you like my work and want to give me a little motivation, please consider donating regularly: https://donate.sury.org/
WARNING: add-apt-repository is broken with non-UTF-8 locales, see
https://github.com/oerdnj/deb.sury.org/issues/56 for workaround:
# LC_ALL=C.UTF-8 add-apt-repository ppa:ondrej/php
More info: https://launchpad.net/~ondrej/+archive/ubuntu/php
Press [ENTER] to continue or ctrl-c to cancel adding it
gpg: keybox '/tmp/tmp1jg_bnfh/pubring.gpg' created
gpg: /tmp/tmp1jg_bnfh/trustdb.gpg: trustdb created
gpg: key 4F4EA0AAE5267A6C: public key "Launchpad PPA for Ond\xc5\x99ej Sur?" imported
gpg: Total number processed: 1
gpg: imported: 1
Exception in thread Thread-1:
Traceback (most recent call last):
File "/usr/lib/python3.5/threading.py", line 914, in _bootstrap_inner
self.run()
File "/usr/lib/python3.5/threading.py", line 862, in run
self._target(*self._args, **self._kwargs)
File "/usr/lib/python3/dist-packages/softwareproperties/SoftwareProperties.py", line 688, in addkey_func
func(**kwargs)
File "/usr/lib/python3/dist-packages/softwareproperties/ppa.py", line 386, in add_key
return apsk.add_ppa_signing_key()
File "/usr/lib/python3/dist-packages/softwareproperties/ppa.py", line 263, in add_ppa_signing_key
tmp_export_keyring, signing_key_fingerprint, tmp_keyring_dir):
File "/usr/lib/python3/dist-packages/softwareproperties/ppa.py", line 212, in _verify_fingerprint
got_fingerprints = self._get_fingerprints(keyring, keyring_dir)
File "/usr/lib/python3/dist-packages/softwareproperties/ppa.py", line 204, in _get_fingerprints
output = subprocess.check_output(cmd, universal_newlines=True)
File "/usr/lib/python3.5/subprocess.py", line 316, in check_output
**kwargs).stdout
File "/usr/lib/python3.5/subprocess.py", line 385, in run
stdout, stderr = process.communicate(input, timeout=timeout)
File "/usr/lib/python3.5/subprocess.py", line 788, in communicate
stdout = self.stdout.read()
File "/usr/lib/python3.5/encodings/ascii.py", line 26, in decode
return codecs.ascii_decode(input, self.errors)[0]
UnicodeDecodeError: 'ascii' codec can't decode byte 0xc5 in position 223: ordinal not in range(128)
rock64@rock64:/var/www/html/nextcloud$ sudo apt-get update
Hit:1 http://ppa.launchpad.net/ayufan/rock64-ppa/ubuntu xenial InRelease
Ign:2 http://ppa.launchpad.net/ondrej/php/ubuntu eoan InRelease
Ign:3 http://ppa.launchpad.net/ondrej/php/ubuntu eoan Release
Ign:4 http://ppa.launchpad.net/ondrej/php/ubuntu eoan/main all Packages
Get:5 http://deb.ayufan.eu/orgs/ayufan-rock64/releases InRelease [1343 B]
Hit:6 http://security.debian.org stretch/updates InRelease
Ign:7 http://ppa.launchpad.net/ondrej/php/ubuntu eoan/main arm64 Packages
Ign:9 http://ppa.launchpad.net/ondrej/php/ubuntu eoan/main Translation-en
Ign:4 http://ppa.launchpad.net/ondrej/php/ubuntu eoan/main all Packages
Ign:8 http://cdn-fastly.deb.debian.org/debian stretch InRelease
Ign:7 http://ppa.launchpad.net/ondrej/php/ubuntu eoan/main arm64 Packages
Hit:10 http://cdn-fastly.deb.debian.org/debian stretch-updates InRelease
Ign:9 http://ppa.launchpad.net/ondrej/php/ubuntu eoan/main Translation-en
Hit:11 http://cdn-fastly.deb.debian.org/debian stretch Release
Ign:4 http://ppa.launchpad.net/ondrej/php/ubuntu eoan/main all Packages
Ign:7 http://ppa.launchpad.net/ondrej/php/ubuntu eoan/main arm64 Packages
Ign:9 http://ppa.launchpad.net/ondrej/php/ubuntu eoan/main Translation-en
Ign:4 http://ppa.launchpad.net/ondrej/php/ubuntu eoan/main all Packages
Ign:7 http://ppa.launchpad.net/ondrej/php/ubuntu eoan/main arm64 Packages
Ign:9 http://ppa.launchpad.net/ondrej/php/ubuntu eoan/main Translation-en
Ign:4 http://ppa.launchpad.net/ondrej/php/ubuntu eoan/main all Packages
Ign:7 http://ppa.launchpad.net/ondrej/php/ubuntu eoan/main arm64 Packages
Ign:9 http://ppa.launchpad.net/ondrej/php/ubuntu eoan/main Translation-en
Ign:4 http://ppa.launchpad.net/ondrej/php/ubuntu eoan/main all Packages
Err:7 http://ppa.launchpad.net/ondrej/php/ubuntu eoan/main arm64 Packages
404 Not Found
Ign:9 http://ppa.launchpad.net/ondrej/php/ubuntu eoan/main Translation-en
Fetched 1343 B in 1s (688 B/s)
Reading package lists... Done
W: The repository 'http://ppa.launchpad.net/ondrej/php/ubuntu eoan Release' does not have a Release file.
N: Data from such a repository can't be authenticated and is therefore potentially dangerous to use.
N: See apt-secure(8) manpage for repository creation and user configuration details.
E: Failed to fetch http://ppa.launchpad.net/ondrej/php/ubuntu/dists/eoan/main/binary-arm64/Packages 404 Not Found
E: Some index files failed to download. They have been ignored, or old ones used instead.
rock64@rock64:/var/www/html/nextcloud$ sudo apt-get install php7.1 php7.1-common
Reading package lists... Done
Building dependency tree
Reading state information... Done
E: Unable to locate package php7.1
E: Couldn't find any package by glob 'php7.1'
E: Couldn't find any package by regex 'php7.1'
E: Unable to locate package php7.1-common
E: Couldn't find any package by glob 'php7.1-common'
E: Couldn't find any package by regex 'php7.1-common'
On va donc faire le plan B :
rock64@rock64:~$ sudo apt install apt-transport-https lsb-release ca-certificates rock64@rock64:~$ sudo wget -O /etc/apt/trusted.gpg.d/php.gpg https://packages.sury.org/php/apt.gpg --2019-09-07 09:36:32-- https://packages.sury.org/php/apt.gpg Resolving packages.sury.org (packages.sury.org)... 2606:4700:30::681f:5fa9, 2606:4700:30::681f:5ea9, 104.31.95.169, ... Connecting to packages.sury.org (packages.sury.org)|2606:4700:30::681f:5fa9|:443... connected. HTTP request sent, awaiting response... 200 OK Length: 1769 (1.7K) [application/octet-stream] Saving to: '/etc/apt/trusted.gpg.d/php.gpg' /etc/apt/trusted.gpg.d/php.gpg 100%[=================================================================================================================================================================>] 1.73K --.-KB/s in 0s 2019-09-07 09:36:32 (7.96 MB/s) - '/etc/apt/trusted.gpg.d/php.gpg' saved [1769/1769] rock64@rock64:~$ sudo sh -c 'echo "deb https://packages.sury.org/php/ $(lsb_release -sc) main" > /etc/apt/sources.list.d/php.list' rock64@rock64:~$ sudo apt update Hit:1 http://security.debian.org stretch/updates InRelease Hit:2 http://ppa.launchpad.net/ayufan/rock64-ppa/ubuntu xenial InRelease Ign:3 http://ppa.launchpad.net/ondrej/php/ubuntu eoan InRelease Err:4 http://ppa.launchpad.net/ondrej/php/ubuntu eoan Release 404 Not Found Get:5 http://deb.ayufan.eu/orgs/ayufan-rock64/releases InRelease [1343 B] Ign:6 http://cdn-fastly.deb.debian.org/debian stretch InRelease Hit:7 http://cdn-fastly.deb.debian.org/debian stretch-updates InRelease Hit:8 http://cdn-fastly.deb.debian.org/debian stretch Release Get:9 https://packages.sury.org/php stretch InRelease [6760 B] Get:11 https://packages.sury.org/php stretch/main arm64 Packages [124 kB] Reading package lists... Done E: The repository 'http://ppa.launchpad.net/ondrej/php/ubuntu eoan Release' does not have a Release file. N: Updating from such a repository can't be done securely, and is therefore disabled by default. N: See apt-secure(8) manpage for repository creation and user configuration details. rock64@rock64:~$ dpkg -l | grep php | tee packages.txt ii libapache2-mod-php7.0 7.0.33-0+deb9u3 arm64 server-side, HTML-embedded scripting language (Apache 2 module) ii php-common 1:49 all Common files for PHP packages ii php-imagick 3.4.3~rc2-2 arm64 Provides a wrapper to the ImageMagick library ii php7.0-cli 7.0.33-0+deb9u3 arm64 command-line interpreter for the PHP scripting language ii php7.0-common 7.0.33-0+deb9u3 arm64 documentation, examples and common module for PHP ii php7.0-curl 7.0.33-0+deb9u3 arm64 CURL module for PHP ii php7.0-gd 7.0.33-0+deb9u3 arm64 GD module for PHP ii php7.0-json 7.0.33-0+deb9u3 arm64 JSON module for PHP ii php7.0-mbstring 7.0.33-0+deb9u3 arm64 MBSTRING module for PHP ii php7.0-mysql 7.0.33-0+deb9u3 arm64 MySQL module for PHP ii php7.0-opcache 7.0.33-0+deb9u3 arm64 Zend OpCache module for PHP ii php7.0-readline 7.0.33-0+deb9u3 arm64 readline module for PHP ii php7.0-xml 7.0.33-0+deb9u3 arm64 DOM, SimpleXML, WDDX, XML, and XSL module for PHP ii php7.0-zip 7.0.33-0+deb9u3 arm64 Zip module for PHP rock64@rock64:~$ sudo apt-get install php7.1 php7.1-common rock64@rock64:~$ sudo -u www-data php occ maintenance:install --database "mysql" --database-host "127.0.0.1" --database-name "dbnextcloud" --database-user "nextcloud" --database-pass "mypassword" --admin-user "admin" --admin-pass "rock64next" Nextcloud was successfully installed rock64@rock64:~$ sudo apt-get purge php7.0 php7.0-common
La sécurité :
rock64@rock64:~$ sudo mkdir /etc/apache2/ssl/ rock64@rock64:~$ PARAMETER_CERT_C="FR" rock64@rock64:~$ PARAMETER_CERT_ST="private" rock64@rock64:~$ PARAMETER_CERT_L="France" rock64@rock64:~$ PARAMETER_CERT_O="DTC" rock64@rock64:~$ CN="nextcloud.mtdc" rock64@rock64:~$ PATHCERTS=/etc/apache2/ssl rock64@rock64:~$ sudo openssl req -new -x509 -days 365 -nodes -subj "/C=$PARAMETER_CERT_C/ST=$PARAMETER_CERT_ST/L=$PARAMETER_CERT_L/O=$PARAMETER_CERT_O/CN=$CN" -out $PATHCERTS/$CN.crt -keyout $PATHCERTS/$CN.key Generating a RSA private key ...+++++ .....................................................+++++ writing new private key to '/etc/apache2/ssl/nextcloud.mtdc.key' ----- rock64@rock64:~$ sudo chmod 644 /etc/apache2/ssl/*.crt rock64@rock64:~$ sudo chmod 600 /etc/apache2/ssl/*.key
Création d’un fichier :
rock64@rock64:~$ cat /etc/apache2/sites-available/nextcloud.mtdc.conf <IfModule mod_ssl.c> <VirtualHost _default_:443> <IfModule mod_headers.c> Header always set Strict-Transport-Security "max-age=15552000; includeSubDomains" </IfModule> ServerName nextcloud.mtdc ServerAdmin webmaster@localhost RewriteEngine On RewriteCond %{HTTPS} off #RewriteRule ^(.*)$ https://%{HTTP_HOST}$1 [R=301,L] DocumentRoot /var/www/html/nextcloud ErrorLog ${APACHE_LOG_DIR}/error.log CustomLog ${APACHE_LOG_DIR}/access.log combined SSLEngine on SSLCertificateFile /etc/apache2/ssl/nextcloud.mtdc.crt SSLCertificateKeyFile /etc/apache2/ssl/nextcloud.mtdc.key <FilesMatch "\.(cgi|shtml|phtml|php)$"> SSLOptions +StdEnvVars </FilesMatch> <Directory /usr/lib/cgi-bin> SSLOptions +StdEnvVars </Directory> <Directory /> Options FollowSymlinks AllowOverride All Order allow,deny allow from all </Directory> <Directory /var/www/html/nextcloud/data> Require all denied </Directory> </VirtualHost> </IfModule>
Fin de l’installation :
rock64@rock64:~$ sudo apt-get install apache2 libapache2-mod-wsgi python-dev rock64@rock64:~$ sudo a2enmod wsgi rock64@rock64:~$ sudo a2enmod ssl rock64@rock64:~$ sudo a2enmod rewrite rock64@rock64:~$ sudo a2ensite nextcloud.mtdc rock64@rock64:~$ sudo a2dismod php5.0 rock64@rock64:~$ sudo a2dismod php7.0 rock64@rock64:~$ sudo a2enmod php7.1
Modification du fichier de config avec l’IP du NexCloud :
rock64@rock64:/var/www/html/nextcloud$ sudo vi config/config.php
...
'trusted_domains' =>
array (
0 => 'localhost',
1 => '192.168.1.22',
2 => 'nextcloud.mtdc'
),
...
Fin de l’installation :
Je viens de voir l’erreur en boucle : You are using a fallback implementation of the intl extension. Installing the native one is highly recommended instead.
Je fais donc l’installation de php-intl :
$ sudo apt-get install php-intl $ sudo apt install php7.1-intl $ sudo systemctl restart php7.1-fpm.service